半年使った i3 Pro X ですが、遂に退役のときが来ましたw (早
今回は HyperCube に Pro X の部品を移植していきます!
さらば、i3 Pro X
こちらが 生贄 ドナーとなる Geeetech i3 Pro X です。
お世辞にも他人におすすめできるプリンターではありませんでしたが、学ぶことは多かったです
ありがとう!
で、ものの数十分でこうなります()
最後までアクリルの保護シートは剥がしませんでしたww
欲しい方がいらっしゃれば、色々問題ありますが、こちらの写真に写ってるの + α くらいの部品をお譲りします 笑
お気軽にコメントくださいませ 笑
奪った ドナー部品

電源 (12V 15A / 180W)

ヒートベッド (MK2A 12Vのみ, サーミスタつき)

アルミ板 (MK2A用)

スプリング、調整ネジと蝶ナット。

電子部品 (NEMA17 ステッピングモーター x 2, 操作パネル, GT2560 Rev A+ コントロールボード)

Mk8 エクストルーダー

大量のケーブル

分解時に気が付いたのですが、コントロールボードはヒートベッドの電源コネクタが軽く焼けていました()
接触不良か何かですかね…。
まだ使えそうだったのでとりえあずこのまま使います。(買うと高いし←)
Mk8 エクストルーダー
先程 i3 Pro X から 取り出した Mk8 エクストルーダーは、Geeetech社の “New” タイプ の Mk8 エクストルーダーでした。
この “New” タイプのエクストルーダーは、プラスチックで作られています。
過度な力が加わると、フィラメントを押さえる重要な部位が割れてしまい、フィラメントを一切つかめなくなってしまうことがあります。(というか多分設計ミスです。)
実は私はこの問題が発生したときに、Geeetech社に直談判したのですが、なんと古いタイプの Mk8 エクストルーダーを送って頂けました。

こちらは、”New” タイプとは異なり、金属で作られているため、上記の故障はまず見られません。
ただ、ドライブギアからヒートブレークまでのところにガイドがついていないため、フィラメントの出し入れをするときや、柔らかいフィラメントを使うときにやや難があります。
まぁガイドは後からプリントして追加できますし、価格もそれほど大差はありません。
したがって、もし別のプロジェクトでGeeetech製 New Mk8 エクストルーダーを買おうとされている方がいらっしゃるのであれば、こちらのエクストルーダーを選ぶことを強くお勧めします。。。
(でも本音言うともっとマシなエクストルーダー選んだ方がいいです。)
写真を見てお分かりいただける通り、こちらは ステッピングモーターがホットエンドと一緒に動く、ダイレクトドライブ のエクストルーダーです。
フィラメントを引き込んでいってくれるタイプなので、より正確にフィラメントを押し出せますし、柔らかいフィラメントも使うことができます。
しかし、今回の HyperCube 3Dプリンター では、より軽く、速く動かすために Bowden タイプ のエクストルーダーが用いられています。
こちらは、エクストルーダーがホットエンドから遠い距離に設置され、長いPTFEチューブを通してフィラメントを押し込んでいくタイプです。ダイレクトドライブほど正確には送れませんが、プリントヘッドがとても軽くなるため、プリント速度が段違いに速くなります。
ホットエンドは こんなちゃっちいのではなく E3Dホットエンドを使うこともありますし、このエクストルーダーには少し細工をほどこしてやる必要があるわけです。
細工

まずはバラします。
ヒートシンクはステッピングモーター部に取り付けられていましたが、正直意味不明な構造ですw

i3 Pro X 向けに作られた専用ボトムプレートも外します。


ワンタッチ継手 を用意します。
私は何故か家に転がってたやつを使いましたが、なければ上部の継手を外して使ってください。もしくは Amazon (*´ω`)
上部のはなくても大丈夫ですw (この場合は、フィラメントが送られる際に削られないようにだけ注意してください。)

ヒートブレークのネジ部に取り付けたら、Bowden タイプのエクストルーダーの完成です (^^)/
残念ながら、この方法は “New” タイプのエクストルーダーには使えませんので、その場合はTech2C氏の用意されているエクストルーダーを作るか、別で購入する必要があります。
(それほど難しくはないとは思いますが、後日改めて紹介しようと思います。)
ステッピングモーターの取り付け
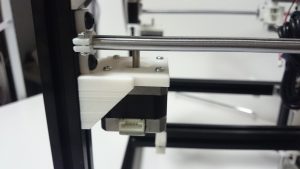
M3 * 10 mm なべネジ でモーターマウントに取り付けます。
i3 Pro X のは少し薄いタイプのNEMA17ステッピングモーターだったみたいですねw
とはいえ、充分なトルクを出せます。

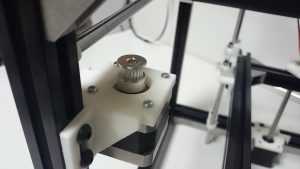
GT2 ドライブギア (20T) を取り付けます。
この時、固定ネジを締めすぎるとシャフトの穴が歪んでしまい、中心が出せなくなってしまいますので、適度に締めこむようにご注意ください。
私はやらかしたのでテープ噛まして無理やり中心出してますw← (一応新しいものを取り寄せしておきましたw)
ベルトの取り付け

GT2 ベルトです。アルミフレームと同様、他の人が白いのを使っていてカッコよかったのでこちらを選びました (*´ω`)
で、ベルトを這わせていこうとしたときに気が付いたのですが・・・

ベアリング付け忘れてるゥ…。
写真を撮り忘れてしまいましたが、一度XY軸ジョイナーだけ取り外して組み直してますw
結構時間かかりました (´・ω・`)
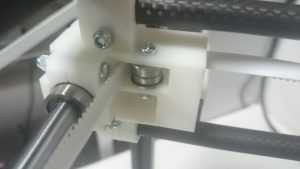
正しい状態はこちらです (=゚ω゚)ノ
ベルトは同じ高さのベアリングやドライブギアに通していけばOKです。

それぞれの終端はXキャリッジに来ます。
右側は折り返して結束バンド (a.k.a. タイラップ, a.k.a. インシュロック (爆)) で固定します。
左側は写真の通り、X_Carriage_beltclamp で固定しています。
ベルトの張りはできる限り強くしておきましょう。
ただ、全力で引っ張っても足りないくらいです 笑
テンショナー構造を追加する必要がありそうですね…。

また、フレーム後部のXY軸ジョイナーのこの部分が、左右同時に接触するようにベルトを調整します。
必要であれば、X軸ロッドの固定ネジを緩めて調整しましょう。
ベルトをしっかり張ることができたら・・・
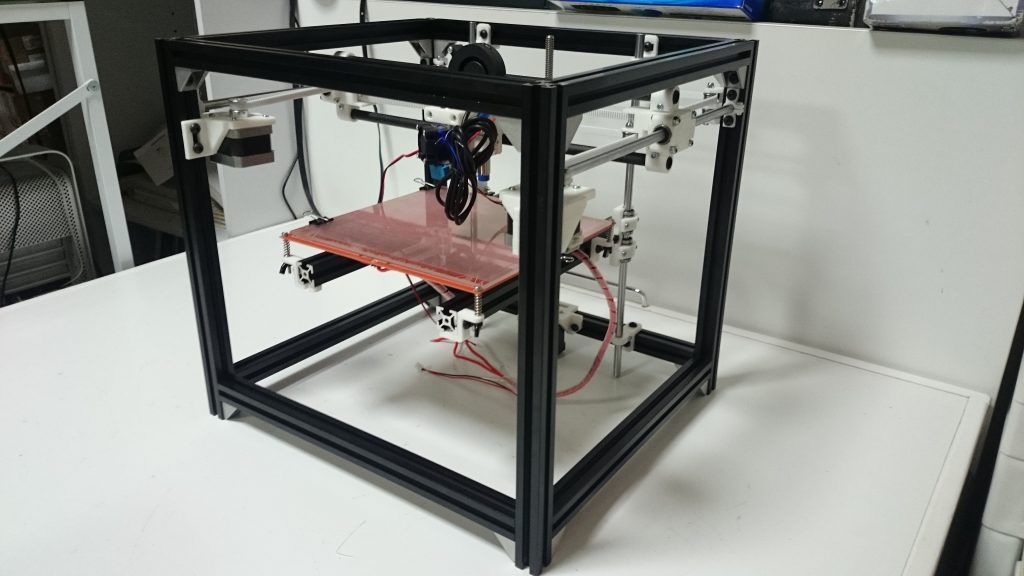
電子部品以外、ほぼ完成です!!(^^)b
もう完全に HyperCube 3Dプリンターです 笑
実際に目の前にあると ウォォォ ってなりますw
CoreXYシステム
CoreXYシステムおもしろいよ! #3Dプリンター #CoreXY #HyperCube pic.twitter.com/JgTDwYve0z
— S2KTS. @ HyperCube 3DP (@s2k_KTS) 2018年1月31日
ベルトを同時に動かすと真横や前後に動きます pic.twitter.com/1wx53ntPyR
— S2KTS. @ HyperCube 3DP (@s2k_KTS) 2018年1月31日
興奮して動画撮っちゃいました ()
片方のモーターが動いている時には、キャリッジは斜め45度の方向に移動します。
原理はわかればシンプルなのですが、よく考え付いたなーという感じですw
CoreXY 特設サイト がありましたので、気になった方は是非見てみてください!英語ですが、図を見てるだけでも何となくわかると思いますw
と、いったところで今回はここまでです!
次回は遂に、“It’s alive!” の回です!笑
今回購入した材料と費用は 特にありません。
詳細は 前回 までのリストをご覧ください!
シリーズ全体の総計: \19,249
3Dプリンターを一台犠牲にしてますが、ノーカンで(=゚ω゚)ノ
一から作る人向けに必要なものリストを以下に置いておきますね (^^)b
- コントロールボード、モータードライバー、操作パネル (Banggood, Amazon など, 約 3,500円)
- トラブルを抱えたときに解決しやすいのは、GT2560よりもRAMPS系ボードですね。
- ステッピングモーター * 2 (Banggood, Amazon など, 約 2,800円)
- NEMA17タイプで、あまりにも薄いやつでなければ大丈夫だと思います。
- モーターやセンサー向けコネクター (Banggood, 約 500円)
- 意外と忘れがち。余ったサーボから奪う手もあります()
- 電源 (Banggood, Amazon など, 約 2,500円)
- 12V電源が必須です。最低でも200W、300W近くみておくと安心でしょう。
- MK3 ヒートベッド (Banggood, 約 1,600円)
- MK2Aの進化版です。より熱が伝わりやすく、24Vにも対応しています。
- レベリング用ネジ、スプリング、ナット (Banggood, 約600円)
- これも忘れがち。オートレベリング機能はありますが、手動でもある程度できた方が綺麗にプリントできます。
計: 約11,500円