遂に・・・遂に動き出します…!!!
エクストルーダーの取り付け

前回 プチ加工を施したエクストルーダーを取り付けます。

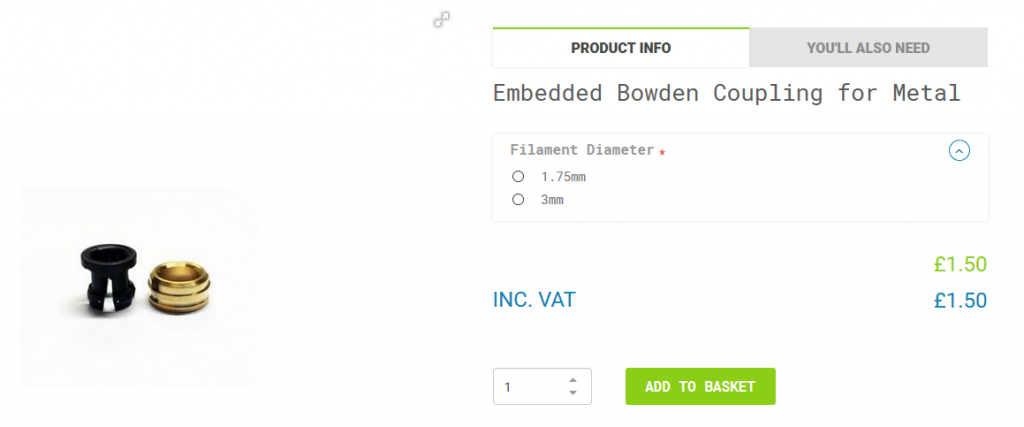
エクストルーダーとホットエンドの間は、内径 2mm * 外径 4mm の PTFEチューブ で繋ぎます。
“PTFE” というのは、いわゆる “テフロン” のことで、潤滑性、温度耐性、耐薬品性などに優れている、ものすごいプラスチックのお名前 (ポリテトラフルオロエチレン) の略称です (=゚ω゚)ノ
(本当にすごい材質ですw)
内径は1.75mmに近ければ近いほど、中でフィラメントが動く振れ幅が小さく、ダイレクトな送りが可能になります。
(米Amazon で内径 1.8mm, 外径 4.0mm のものが販売されているみたいですね~ 1mちょいで 約 1,300円するんですが、どうなんでしょ…。)

エクストルーダーの継手にPTFEチューブを取り付けます。
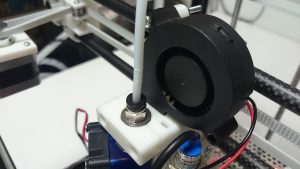
E3D V6 ホットエンド側の継手も同様に取り付けます。
このとき、ホットエンド内の奥の方までしっかりと差し込まないと、溶けたフィラメントが詰まってホットエンドがダメになってしまいます。
奥までズッポリ挿しこんでください♂
ちなみにE3D純正のコネクタはもっとスマートでかっこいいものが使われていますw

エクストルーダーは、フレーム上部に結束バンドで固定してますw
というのも、Banggood で M5 の Tスロットナットを 2パック 購入したのですが、うち 1パック がM4のものだったからです…。
海外通販はこれが怖いですね・・・。
当然ながら使い物になりませんので、返金してもらいました…。(ポイントでの返金。対応は素早かったです!)

実は既に、SUS社のフレームのTスロットの幅である、6.0mm 向けのナットを別の場所で購入しており、到着待ちの状況です。到着して使えるようであれば報告しますね (^^)b
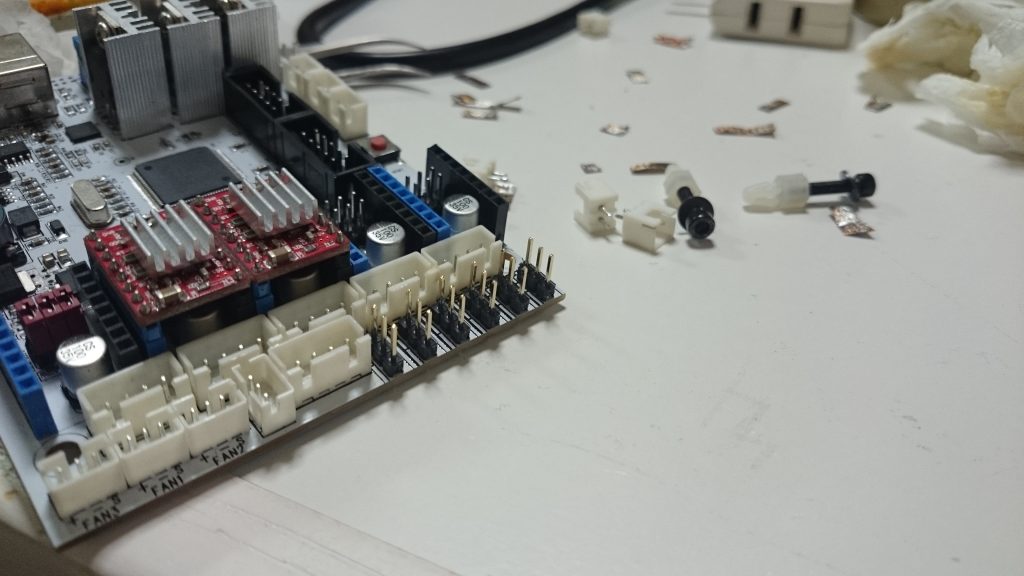
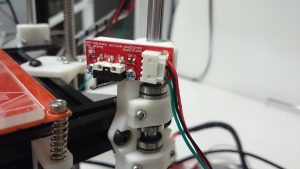
TMC2100の取り付け
以前、こちらのブログで 紹介 した、TMC2100 は HyperCube にも取り付けます!
もうこれは3Dプリンターのマストアイテムです!
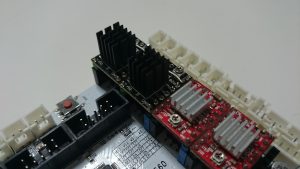
黒い基板がかっこE (^^)b
(方向に気を付けましょう。焼くとかなCです。)
コントロールボードの加工

GT2560 Rev A+ コントロールボードでは、エンドストップのコネクタが、全て2ピンコネクタになっています。
今回使うエンドストップは、

このように、電源線、GND線、信号線の3本の線が必要となります。
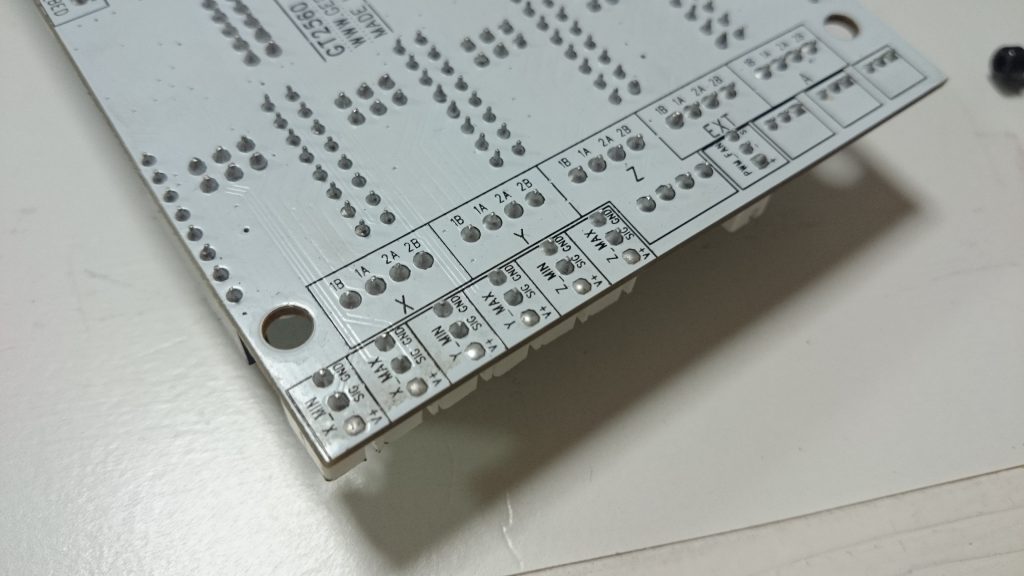
幸い、GT2560ではコネクタを交換することでこのようなエンドストップにも対応できるようになっています。まぁ逆に言えばコネクタを交換しなくちゃならんわけです。。。

たまたまストックしてた 2.54mm ピンヘッダ を、ハンダごてとハンダリムーバーを使ってちまちま変えていきます。(本当にギリギリの数しかありませんでしたw)
約2時間に及ぶ格闘の末、ふつくしいピンヘッダが取り付けられました。
結構大変でした…。


GT2560のピンアサインに合わせるため、黒と赤のコネクタを入れ替えます。
先の尖ったもので、コネクタをロックしている樹脂部を軽く起こしてやれば、圧着端子がスポンと抜けます。
途中でぶった切って結線し直して半田付けするのも方法としてはありますが、トラブルの原因となりやすいですし、こっちの方が見た目綺麗なのでオススメです (=゚ω゚)ノ
Z軸モーターケーブルの配線の結線入れ替え
Z軸のステッピングモーターは、i3 Pro X に使われていたモーターとは結線方法が異なっていましたので、入れ替えました。

画像の通りですw
ちなみになんで気づいたかっていうと、テスト接続して電源投入してみたら「ガガガガッ」とすごい音を立ててるのに動かなかったからです ()
最初は脱調かと思ったのですが、手でリードスクリューを動かすとスムーズなので、これが原因だとわかりました。
エンドストップの取り付け
X軸 のエンドストップは既に ビルドログ #6 で取り付けているので、残るは Y, Z軸 のエンドストップです。

まずは Y軸。プリント部品 Y_EndStop と、M3 * 6mm なべネジ、ナット を使って固定します。
Z軸も同様に取り付けます。プリント部品は Z_EndStop_v1.1 です。
ただこいつ、そのままだとビルドプラットフォームのどこにも触れません。
実はこれは Z_EndStop_Adjust_v1.1 を使って、調整機構を追加してやる必要があるのですが、今回は近接センサーを取り付けましたので、こちらのエンドストップは使わないことにします。
不良エンドストップ
動作確認の為、エンドストップを取り付け、電源を投入すると、電源LEDが弱弱しく光るだけで起動しません。
明らかにどこかがショートしている反応なので、どこがショートしているか探していると。。。
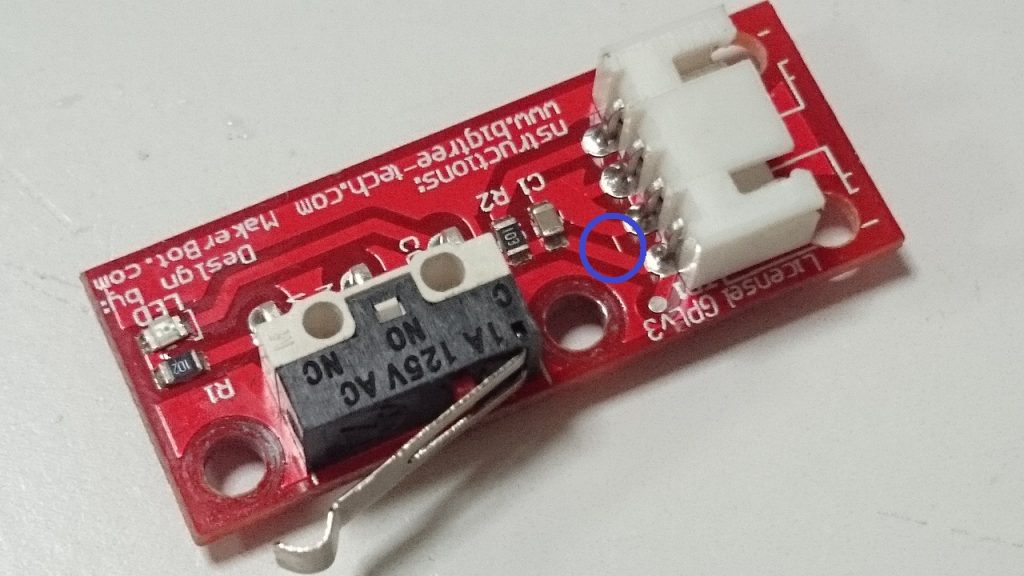
oh, bridging…
どうしてこうなったのかはさっぱりわかりませんが、信号ラインとGNDラインが直結してありましたww
信号ラインになぜ電圧がかかったのかは不明ですが、商品画像にもこんなブリッジはありませんし、他の2つにも存在しないパターンであったので、これがショートの原因であることは明らかでした。
カッターでパターンを剥がしてやると、しっかり動作しました。
コントロールボード焼けなくてよかったですw
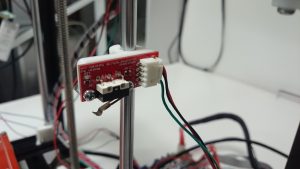
近接センサのコネクタ取り付け
近接センサは、以下の状態で売られていました。
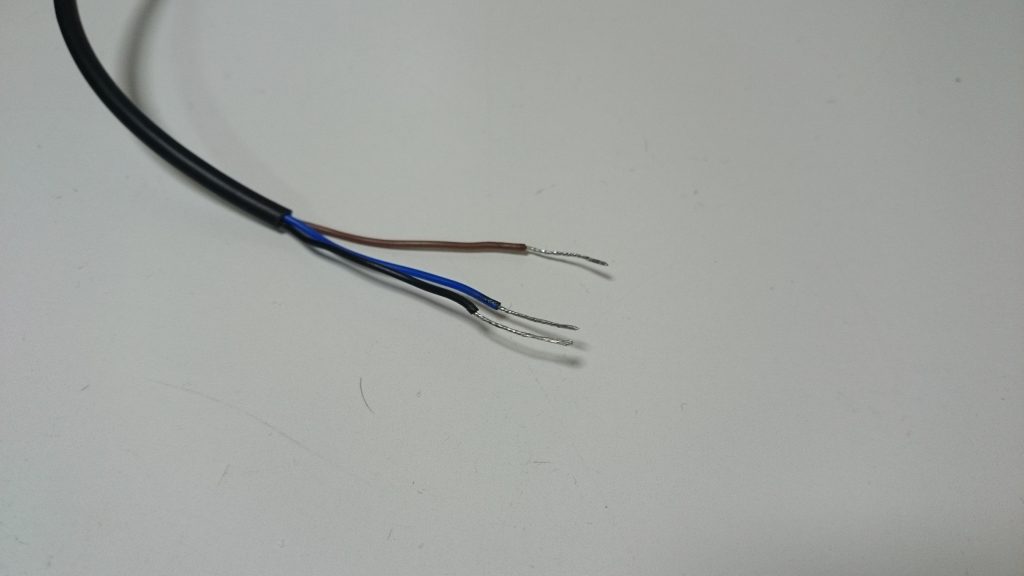
画像が不明瞭ではありますが、明らかに手作業でハンダ付けしたなゴルァって感じの、雑な配線が伸びていましたww まぁ動作すればいいんですがね 笑
このままコントロールボードに取り付けるのは恐ろしいので、
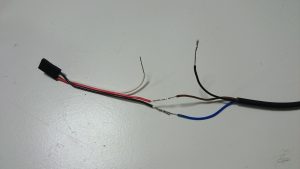

部屋に転がってたサーボのコネクタをちょん切って取りつけました。
こういう結線をしたときは必ず収縮チューブを使いましょう。ビニテじゃダメです。危ない。
(ってか圧着端子買えよって話ですがw)
茶色が電源、青 が GND、黒 が 信号 という、まぁ謎な割り当てになっていました。
上の左側の写真は動作確認のために信号線だけオープンにしてある、の図です 笑
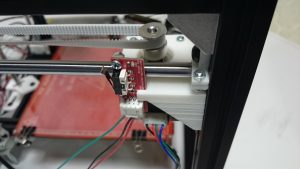
結線後、電源を入れて動作確認をしてみると・・・?


ちゃんとアルミ板に反応してくれてます (^^)b
LEDが光っているのがお分かり頂けるでしょうか…?
(また、このタイミングでアルミ板に交換しました ())
製品仕様では、動作電圧は 6-36V となっていますが、この個体は 5V でも動作しました。
少し心配していた部分ではあったのですが、正しく動作してひとまずは安心しました。
(5Vで動作しない場合には、12V 電源に接続し、信号線は抵抗で分圧して接続しましょう。)
これが終わったら全ての電子部品を接続します!
接続方法はベースとなるプリンターの仕様によって異なると思うので、ここでは割愛させて頂きます。
GT2560 の情報は、Geeetechの公式Wiki が役に立ちますよ (^^)b
ファームウェア
i3 Pro X のファームウェアだと、当然ながら正しく動作しません。
Marlin の Configuration.h を HyperCube 用に書き換えてやる必要があります。
できる限り早く HyperCube を動かしたかったので、今回は Tech2C氏が用意されている RAMPS 1.4 向けの Configuration_with_sensor.h をベースに、GT2560 Rev A+ 用の書き換えをしました。
書き換えたファイルは、こちら からダウンロードできますよ (=゚ω゚)ノ
(PIDチューニングはめんどいのでしてませんw)
書き換えた点は以下の通りです。
- 121行目 コントロールボードの設定
- BOARD_RAMPS_14_EFB -> BOARD_ULTIMAKER
- GT2560 コントロールボードは Ultimaker ボード
のパクリと同じピンアサインになっています。
- 488行目 エンドストップ割り込みの設定
- コメントアウト
- CPUサイクルがかなりセーブされるらしいので、本当は使えたほうがいいんでしょうけど、エラーを吐いてしまうので無効化しました。ボードの仕様なんでしょうねぇ…。
- 515行目 1mmあたりのステップ数
- { 80, 80, 400, 100 } -> { 80, 80, 400, 90 }
- Mk7ギアに比べ、Mk8ギアは外径が大きいため、オリジナルのままだとフィラメントが多く排出されてしまいます。次回のビルドログで、この設定方法について紹介しようと思います。
- 742行目 エクストルーダーの回転方向
- INVERT_E0_DIR false -> INVERT_E0_DIR true
- 実際にプリントしようとしたらフィラメントがどんどん戻っていくので (ww)、ひっくり返しました。
- 833行目 オートベッドレベリング
- コメントアウトを外しました
- 本当は一個下のBILINEARの方が良いんでしょうけど、使い方がわからなかったのでこちらを選びました。使い方などの詳細については、後ほど紹介したいと思います。
- 859行目 プローブ(近接センサ) のセンシング位置
- LEFT_PROBE_BED_POSITION 15 -> LEFT_PROBE_BED_POSITION 30
- コンパイル時に、「あんさん、それやとヘッドが正しく動きまへんで!」と怒られてしまったので、少し位置をずらしました。
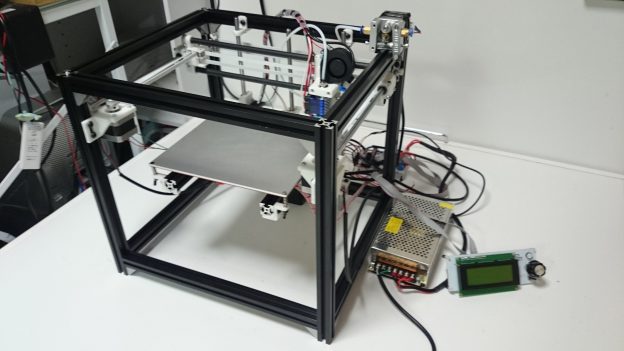
ファームウェアを書き込んだら HyperCube 3D プリンターの完成です!ひゃっふぅ!
“It’s alive!”
ウォアアアアアア動いたああああああ??? pic.twitter.com/mLTX57QXor
— S2KTS. @ HyperCube 3DP (@s2k_KTS) 2018年2月2日
まじで嬉しかったです 笑
おぉ、プリントできてる! pic.twitter.com/C5DIW9P61f
— S2KTS. @ HyperCube 3DP (@s2k_KTS) 2018年2月2日
カールを気にしなければもっと速く行けそう pic.twitter.com/t6cI8ViQfu
— S2KTS. @ HyperCube 3DP (@s2k_KTS) 2018年2月2日
めっちゃ綺麗 pic.twitter.com/pA4LgPlsyG
— S2KTS. @ HyperCube 3DP (@s2k_KTS) 2018年2月2日
実際に動かしてみてわかったのは、MeCreator 2に比べて、圧倒的に静かであることや、圧倒的に速くプリントできることですね (*´ω`*)
もちろん、プリントクオリティも格段に上です!
目標は達成したと言えるでしょう!笑
コスト
さて、ビルドログシリーズのここまでにかかった費用についてです。
今回購入した部品はありませんが、一応ピンヘッダの値段を追加しておきますw
気になる総計は~…?
・・・・
ジャカジャカジャカジャカ….
・・・・
19,284円 でした!!!
思ってたより安かったですw
これならもっと早くやっておくべきだったかもしれません…
生贄 ベースとなる3Dプリンターを持っていない人でも、これに 前回 計算した 11,500円 を足した、30,784円 で HyperCube 3Dプリンターを作ることができます!
MeCreator 2 が 45,000円 くらいだったと思うので、圧倒的コスパと言えると思います 笑
もうちょい色々買い増ししてもお釣りがくるでしょうw
まとめ
とりあえず、この回で HyperCube 3Dプリンター の組み立ては完成です (*´ω`*)
(が、まだまだ続ける予定です!)
総じて、HyperCube 3Dプリンター はお世辞抜きでかなり良いプリンターであると思いました。
部品の相性や、海外通販の難易度などはありますが、初心者からエキスパートな方まで、様々な方にオススメできるプリンターです。
特に、アクリル製 3Dプリンターを既にお持ちで、「プリントクオリティが悪すぎてタンスの肥やしになってる…」、という方には是非こちらのアップグレードをお試しいただきたいです!
3Dプリンターをまだ持っていない方にも、お勧めしたいプリンターです。
プリントパーツはお譲りしますので、ご自分で組み立ててみてはいかがでしょうか?(=゚ω゚)ノ
もう少し大きめのベッド (30cm * 30cm など) が欲しい、という方には、SCOTT_3D氏による、HyperCube Evolution の方をお勧めします。
30cm四方程度であれば、HyperCubeでも問題ないかとは思いますが、それ以上になってくると流石に 2本 の Z軸の 8mm ロッド では強度不足だと思います。(フレーム自体は問題ありません。)
こういう場合には、HyperCube Evolution – Dual Z axis バージョン を選びましょう (^^)b
プリントパーツのリクエストはもちろん、ビルドログシリーズの中で、不明な点、間違った点などありましたら是非コメント欄よりご指摘ください (^^)b
次回はプリント設定を調整します!
送料込み \45kくらいで買ってくれる方がいればこのままお譲りします 笑
ありがとうございました。大変参考になりました、お気に入りに登録です。
コメントいただきありがとうございます!
かなりお勧めの1台ですので、チャンスがあれば是非一度お試しください笑